
DFRobot Rover - Compatible con Arduino es un tanque versátil robot móvil basado en el popular microcontrolador Arduino Duemilanove. El Rover utiliza el popular sistema Tamiya caja de cambios de doble motor y la pista de Tamiya y juego de ruedas.
El PCB DFRobotShop Rover incorpora una norma Arduino Duemilanove (montaje en superficie ATMega328), L293B controlador de motor (conectado a los pines de 5 a 8), regulador de voltaje y el área de prototipos al tiempo que contribuye a la estructura mecánica del robot.
Características
• compatible con Arduino
• Sobre la base de montaje cuenta con ATMega328 y el Puente H L293B
• Incorpora doble puente en H para bi-direccional de control del motor (los pines digitales 5, 6, 7 y 8)
• El regulador de voltaje incluido (conectado a la entrada de la batería y conector cilíndrico de 3,5 mm)
• Sensor de luz y sensor de temperatura pre-soldada y seleccionable a través de puentes
• Fácil conexión a Bluetooth y DFRobot APC220 módulos inalámbricos
• Zona de creación de prototipos grande para un empate 400 puntos o 170 puntos de amarre paneras soldadura o su "carga" propia
• Los conectores macho I2C para una fácil conexión
• "punto de conexión universal" en la parte delantera del robot (ver especificaciones de compatibilidad)
• LED 6x azules alrededor de la junta para el efecto (seleccionable mediante jumper LED_SEL)
• En el sistema de programación a través de ICSP
• LED de 4x para indicar la dirección del motor
• compatible con Arduino
• Sobre la base de montaje cuenta con ATMega328 y el Puente H L293B
• Incorpora doble puente en H para bi-direccional de control del motor (los pines digitales 5, 6, 7 y 8)
• El regulador de voltaje incluido (conectado a la entrada de la batería y conector cilíndrico de 3,5 mm)
• Sensor de luz y sensor de temperatura pre-soldada y seleccionable a través de puentes
• Fácil conexión a Bluetooth y DFRobot APC220 módulos inalámbricos
• Zona de creación de prototipos grande para un empate 400 puntos o 170 puntos de amarre paneras soldadura o su "carga" propia
• Los conectores macho I2C para una fácil conexión
• "punto de conexión universal" en la parte delantera del robot (ver especificaciones de compatibilidad)
• LED 6x azules alrededor de la junta para el efecto (seleccionable mediante jumper LED_SEL)
• En el sistema de programación a través de ICSP
• LED de 4x para indicar la dirección del motor
Para comenzar se tiene que instalar la IDE de arduino y tener un cable USB
ubuntu
$ sudo apt-get install -y arduino
Fedora
$ sudo yum install -y arduino
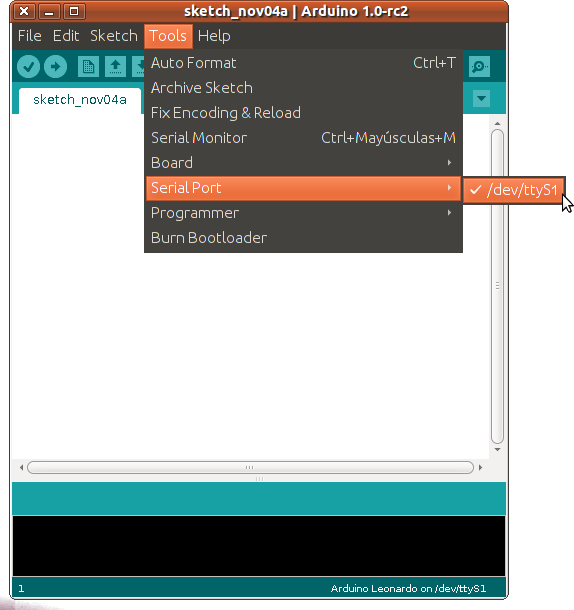
Una vez seleccionado tienes que seleccionar el puerto donde tienes conectado DFRover
Tiene que ser algo parecido a USB
Despues seleccionamos el tipo de arduino
>seleccionas Arduino Duemilanove Atmega328

Puedes testear los siguientes códigos.
1. Código ejemplo para testear los sensores de luz y de temperatura
1. Código ejemplo para testear los sensores de luz y de temperatura
8 para el lab de integrados
ResponderEliminar